Lập trình Robot mini thông minh v2 bằng ngôn ngữ tư duy kéo thả

Liên hệ
- Giao diện trực quan, phân chia các khu vực rõ ràng, màu sắc bắt mắt.
- Thao tác kéo thả dễ dàng.
- Hỗ trợ chuyển đổi đa ngôn ngữ, dễ dàng sử dụng.
- Tương tác trực tiếp với robot thông qua các block được LE Electronics xây dựng.
- Thao tác nạp code dễ dàng, hỗ trợ đa nền tảng Arduino.
Lập trình Robot mini thông minh v2 bằng ngôn ngữ tư duy kéo thả
Dựa trên nền tảng ngôn ngữ lập trình tư duy kéo thả mà LE Electronics đã giới thiệu ở bài viết trước, với phiên bản Robot mini thông minh v2 chúng tôi đã phát triển bộ thư viện lập trình bằng các block chức năng giúp cho người học có thể dễ dàng tiếp cận và làm chủ Robot trong thời gian nhanh nhất, ngoài ra với ngôn ngữ lập trình tư duy kéo thả sẽ giúp hình thành tư duy logic, tính sáng tạo và tăng thêm sự sinh động cho các bài thực hành lập trình.
Bộ thư viện lập trình xây dựng dưới 2 ngôn ngữ là tiếng Anh và tiếng Việt, được chia thành các nhóm block tương ứng với những tính năng chính của Robot mini thông minh v2:

Nhóm block dò đường

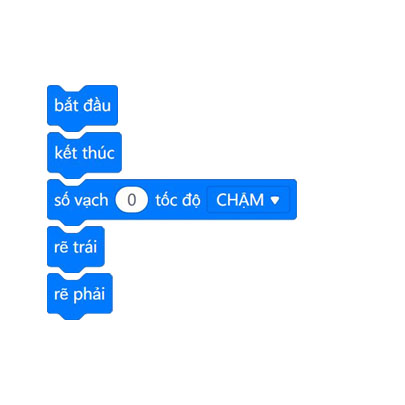
- start: block khởi động chương trình dò đường, bắt buộc gọi ở đầu chương trình
- end: block kết thúc chương trình dò đường, bắt buộc gọi ở cuối chương trình
- number of horizontal lines ” x ” speed ” y “: chương trình đi thẳng dò đường.
- x: số vạch cần đi
- y: tốc độ di chuyển
- turn left, turn right: chương trình rẽ trái, phải ở các ngã tư.
- Chương trình demo:



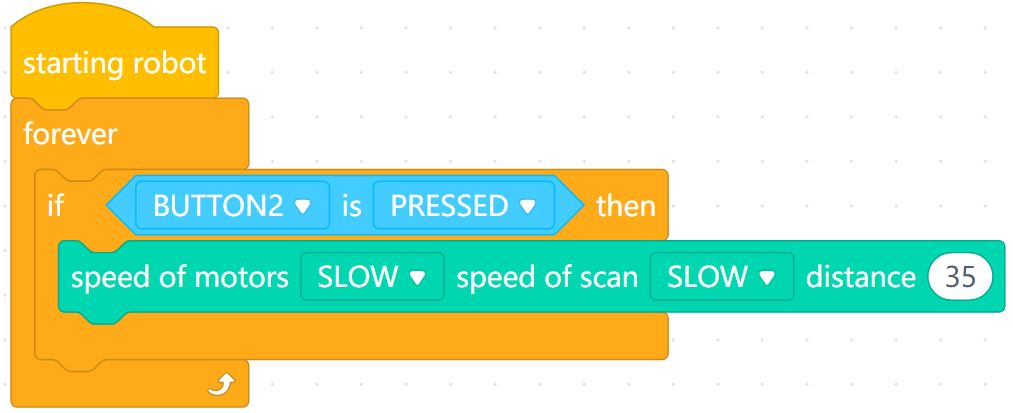
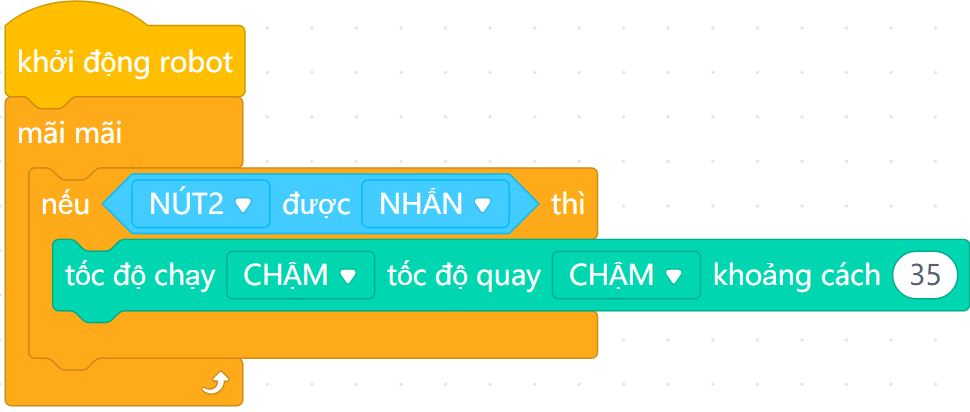
Nhóm block tự hành


- speed of motor ” x ” speed of scan ” y ” distance ” z “: block điều khiển chế độ tự hành.
- x: tốc độ di chuyển
- y: tốc độ quét động cơ servo
- z: khoảng cách bắt vật cản
- Chương trình demo
Nhóm block bluetooth

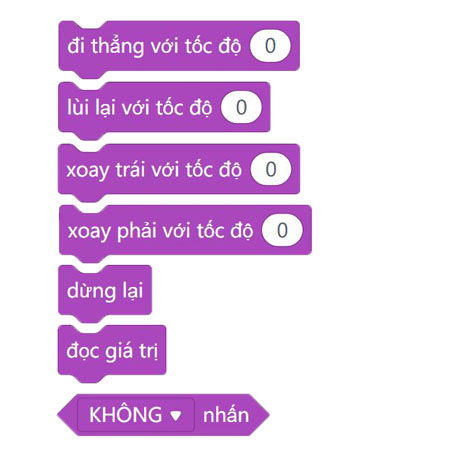
- move forward at speed ” x “: block chương trình đi tiến với tốc độ ” x “
- move backward at speed ” x “: block chương trình lùi lại với tốc độ ” x “
- turn left at speed ” x “: block chương trình xoay trái với tốc độ ” x “
- turn right at speed ” x “: block chương trình xoay phải với tốc độ ” x “
- stop moving: block chương trình dừng động cơ
- ” y ” press: block kiểm tra nút nhấn trên điện thoại android
- reading value: block đọc giá trị nhận được qua bluetooth, bắt buộc phải gọi ra ở đầu chương trình
- Chương trình demo:


*Hỗ trợ khách hàng
Hãy là người đầu tiên nhận xét “Lập trình Robot mini thông minh v2 bằng ngôn ngữ tư duy kéo thả”
Có thể bạn thích…

-20%

Sản phẩm tương tự


Đánh giá
Chưa có đánh giá nào.